Use your smartphone to control an airboat
Our project for this issue of Raspberry Pi Geek is building an airboat connected to an Arduino, to which we send commands over Bluetooth from a smartphone. The electrical parts you'll need for this project are listed in the "Electronics" box.
For flotation, we used two medium-sized plastic bottles, and for the frame we used K'Nex pieces (Figure 1) [5]. Duct tape worked well to attach the K'Nex frame to the bottles. One of the fans had fan blades that were molded backward, which is why it is mounted on the back of the frame facing the opposite direction; otherwise, all three fans should face forward. The fans can be attached to the frame with wire or bolts and screws. To protect the Arduino, a plastic container can be taped to the middle of the frame.
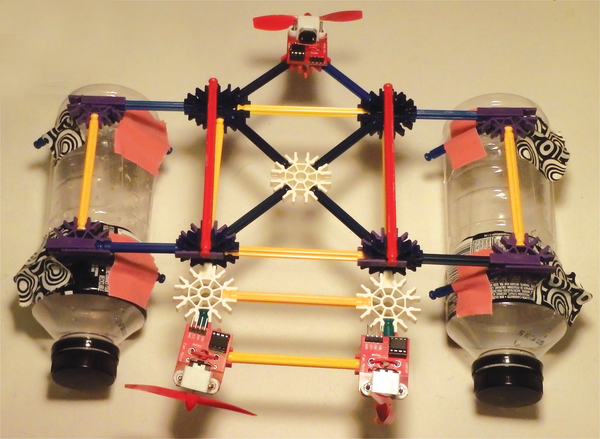 Figure 1: The airboat frame.
Figure 1: The airboat frame.
[...]
Buy this article as PDF
Pages: 4
(incl. VAT)
Buy Raspberry Pi Geek
US / Canada
UK / Australia
Related content
-
Build cool stuff with littleBits, a Pi, and some Lego Bricks

Connect the littleBits Arduino module to a Raspberry Pi and you open a world of projects and a world of fun.
-
Make an Android phone app to control your littleBits projects

Make a remote control paddleboat with the littleBits Arduino module, DC motors, and generic Bluetooth module and control the boat with a phone app that uses the MIT App Inventor package.
-
Control your Arduino and Pi projects with a PSP

We create a micro web server on an Arduino and a Raspberry Pi, and then use a PSP web browser to control an airboat.
-
Create a remote control motorized robot arm

Use an Arduino Mega to manage a 4-motor robot arm and a 2-motor car chassis. The MIT App Inventor package was used to create an Android app that controlled-the robot.
-
Digital – Analog – Mechanical

As innovative companies consistently push the envelope of progress, antiquated hardware nearly two years old falls by the wayside. We take an old iPad, an Arduino Mega, and various other materials to create an in-dash climate control app.
