Hands On
With an ESP8266 and a few components, you can put together your own robot arm.

Lead Image © realmccoy, 123RF.com
With an ESP8266 and a few components, you can put together your own robot arm.
The ESP8266 is an extremely versatile chip. One of its many uses includes controlling servomotors. By way of example, during one of our workshop sessions we took some circuit boards and put together a robot arm, which in this project will attempt to solve the "Tower of Hanoi" puzzle (See box out: Until Doomsday)
A rudimentary robot arm requires at least four planes of movement: one at the very base to rotate the robot itself, and three in the arm to move it to different positions. Figure 1 shows a simplified diagram for this model.
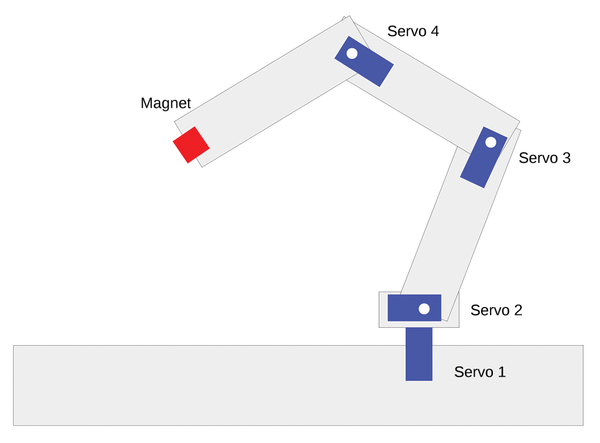 Figure 1: This plan for a robot arm is extremely simplified but shows the basic components you need to make it moveable.
Figure 1: This plan for a robot arm is extremely simplified but shows the basic components you need to make it moveable.
[...]
Pages: 8
US / Canada
UK / Australia

A successful solar power project requires data analysis and the ability to modify the system to take advantage of prevailing weather conditions.

We show how to wirelessly control pan/tilt servos with an Arduino Yún and a Raspberry Pi.

A Raspberry Pi Camera module and a diagnostics system allows SunRover to see and check that all systems are go.

An Advent calendar during the Holiday season is a lovely tradition, but the calendars on the market are rather ordinary. We describe a Rasp Pi project that lets you create an innovative and unique Advent calendar.

The Arduino platform is not limited just to serious home automation projects. In this article, we show you how easy it is to make something fun.

Price $15.99
(incl. VAT)